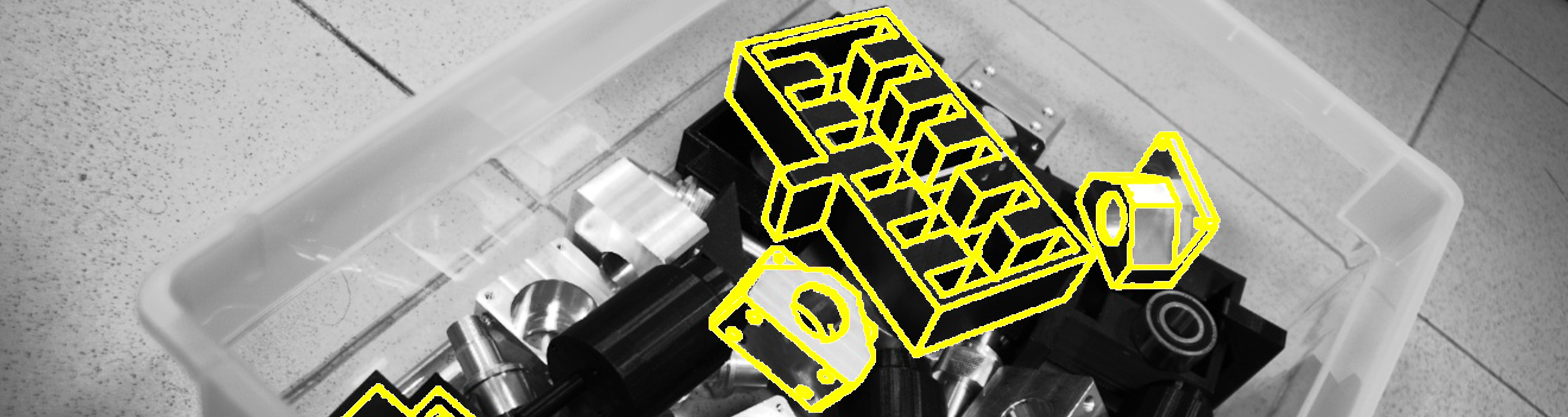
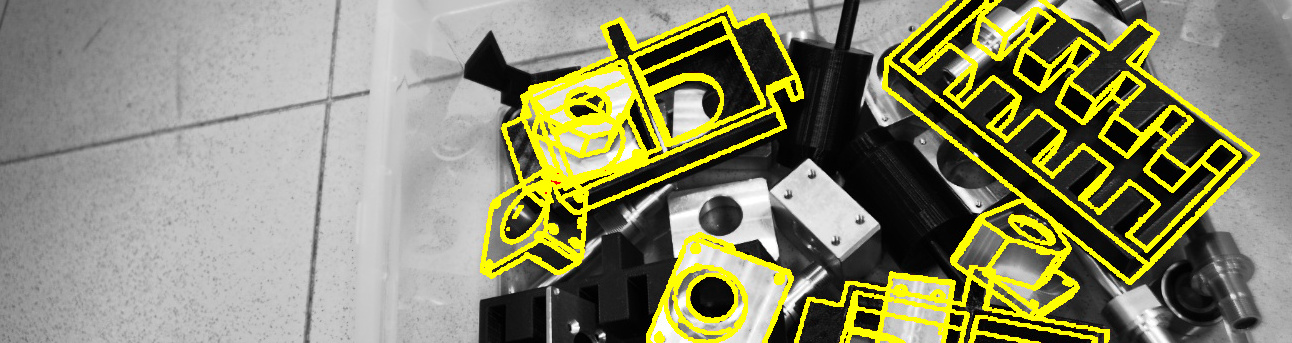




Some of the objects used in the experiments.
D²CO Object Registration


Correct registrations rate plotted against the distance (angle + translation) of the initial guess from the ground truth position (each plot is referred to a different object).
Multi-view D²CO Object Registration

Correct registrations rate plotted against the distance (angle + translation) of the initial guess from the ground truth position (each plot is referred to a different object).
Active Object Recognition and Localization
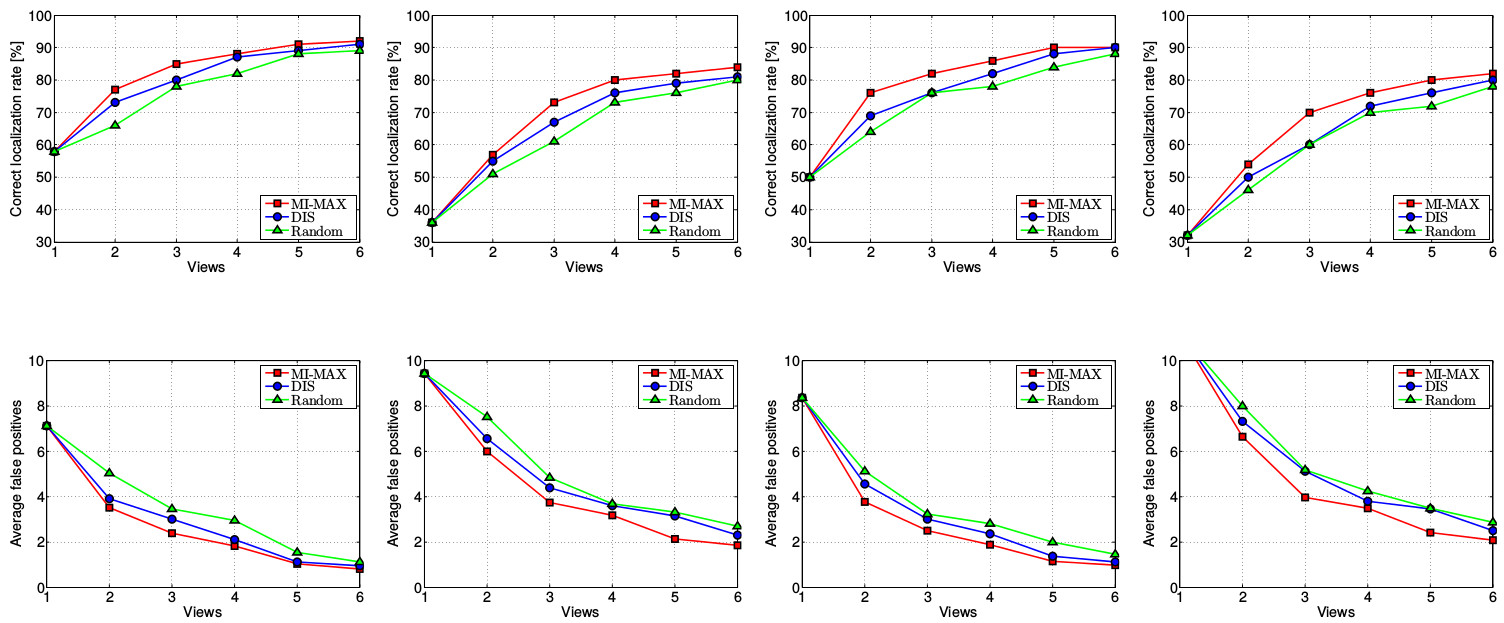
Our active perception approach (MI-MAX in red) compared with other methods.