Sensor-based Exploration Tree (SET) Method
We present a method for sensor-based exploration of unknown environments by a robotic manipulator equipped with rangefinders. The method is based on the incremental generation of a data structure called Sensor-based Exploration Tree (SET). The generation of candidate actions is driven by information at the world level, where the perception process takes place. In particular, the free boundaries of the explored region are used to guide the search for informative view configurations. Different exploration strategies are obtained by instantiating the general SET method with different sampling techniques. Two of these are critically compared by simulations in 2D and the 3D worlds.
The SET method has been designed and developed by: L. Freda, G. Oriolo, F. Vecchioli.
More details are given in this paper presented at IEEE/RSJ IROS 2008.
Realized in Move3D, these simulation clips highlight the essential
exploratory qualities of the SET method.
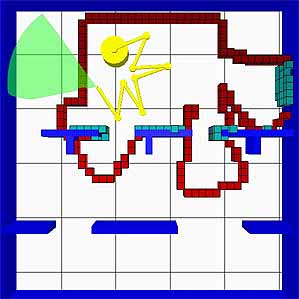
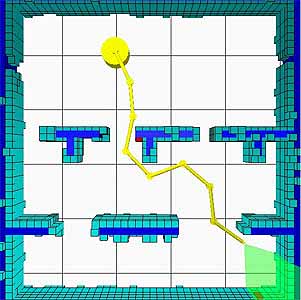
In all the following simulations, exploration is performed by 'covering' the world with sensory perceptions. The world is represented by a 3D occupancy gridmap. The boundary of the explored region is shown: this is the union of the obstacle boundary (which represents the reconstructed obstacles, depicted with light-blue cells) and the free boundary (which separates explored and unexplored regions, depicted with red cells).
Simulations with a single rangefinder: the sensor is mounted at the end of the last robot link and is not explicitly shown. The reported number of revolute joints includes additional sensor degrees of freedom (one for 2D worlds, two for 3D worlds).
Simulation 1: planar manipulator with 9 revolute joints (8R +1R).
Simulation 2: planar manipulator with 7 revolute joints (6R +1R).
Simulation 3 and Simulation 4 : planar snake-like robot with 4 revolute joints and a free-flying base (2P+3R+1R).
Simulation 5: manipulator with 6 revolute joints (4R+2R).
Simulation 6: manipulator with 9 revolute joints (7R+2R).
Simulations with many rangefinders: each sensor is mounted on a distinct link and comes with additional degrees of freedom (one for 2D worlds, two for 3D worlds).
Simulation 7: planar manipulator with 6 revolute joints and three rangefinders (6R + 3R).
Simulation 8: planar manipulator with 8 revolute joints and three rangefinders (8R + 3R).