UAV-UGV Collaborative Mapping
Aerial-Ground Collaborative 3D Mapping Datasets
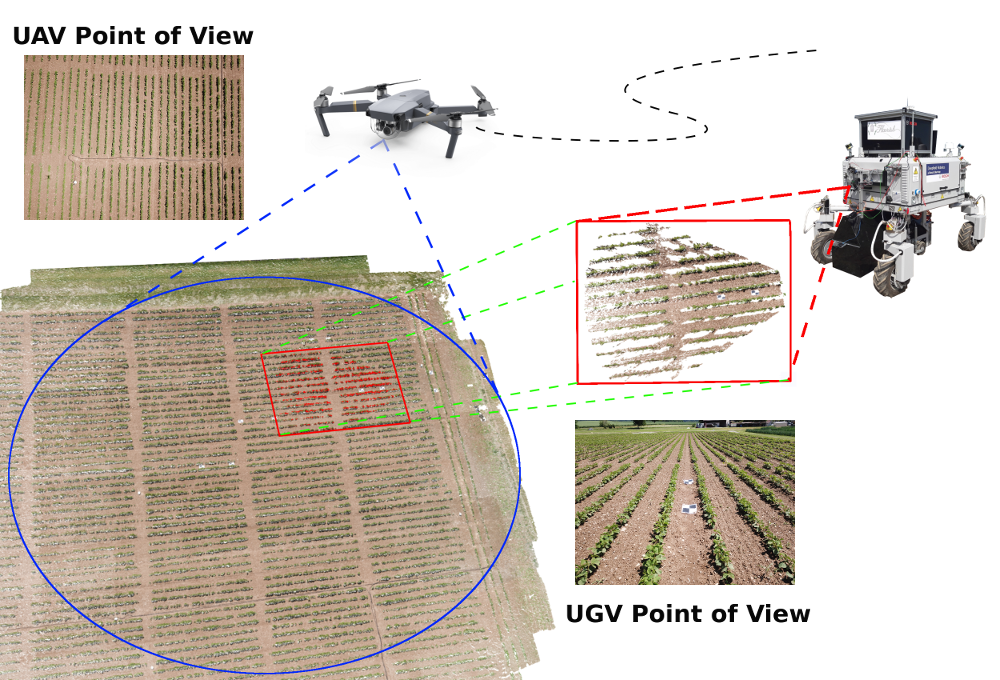
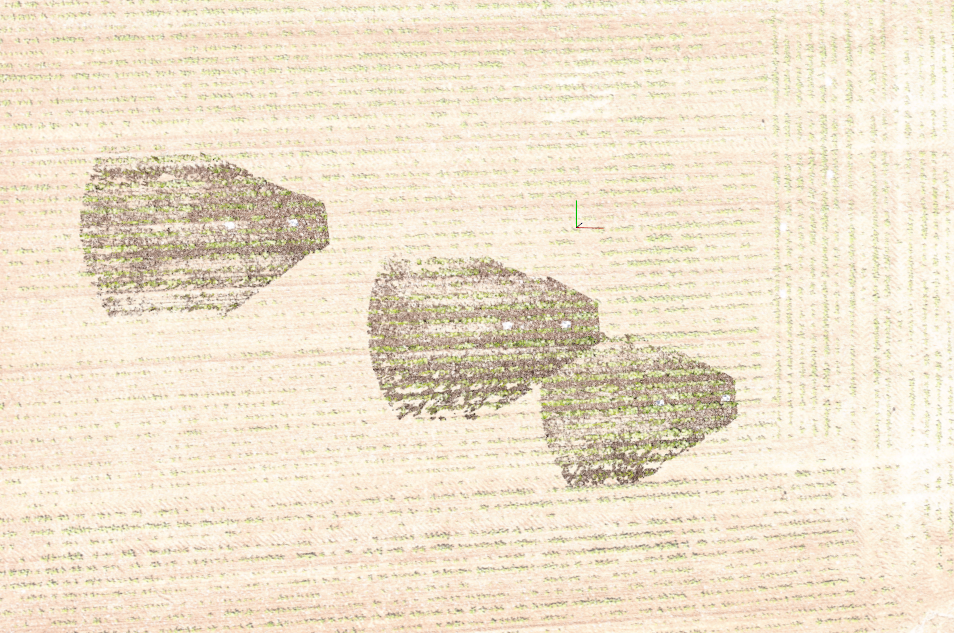
The combination of aerial survey capabilities of Unmanned Aerial Vehicles with targeted intervention abilities of agricultural Unmanned Ground Vehicles can significantly improve the effectiveness of robotic systems applied to precision agriculture. In this context, building and updating a common map of the field is an essential but challenging task. In order to benchmark 3D multi-robot SLAM and map registration algorithms in agricultural scenarios, we collected three challenging datasets of three crop types in Eschikon, Switzerland, at ETH crop science facility. All the datasets include geo-tagged 3D maps registered by UAV and UGV robots with their relative ground truth.
In the following, the complete dataset list:
Soybean Dataset: 20180524-mavic-soybean.zip
Winter Wheat Dataset: 20180311-mavic-ww.zip.zip
Sugar Beet Dataset 10m: 20180524-mavic-sugarbeet-10m.zip
Sugar Beet Dataset 20m: 20180524-mavic-sugarbeet-20m.zip
Each dataset contains:
More specifically, each folder contains:
<acquisitionDate>_mavic_uav_<cropType>_eschikon: folder containing the UAV colored point cloud <acquisitionDate>_mavic_ugv_<cropType>_eschikon_<rowNumber>: folders containing the UGV colored point clouds according to their rowNumber

- offset.xyz: initial guess global position (GPS), attitude and heading (AHRS)
- point_cloud.ply: colored point cloud in Polygon File Format (PLY) format
