
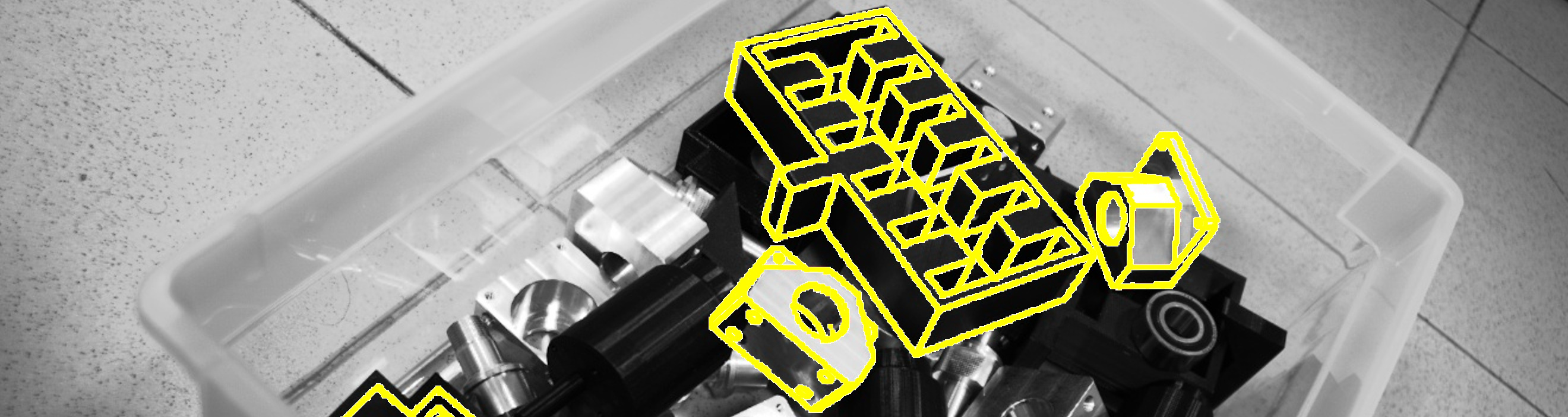


FlexSight
The FlexSight experiment aims to provide a robotic solution for the "pick&place" class of applications with rigid and deformable objects. The project focuses on building a prototype smart camera - the FlexSight Sensor (FSS) - which can be integrated in the chassis of an existing robot to empower it with detection and localization capabilities. The main objectives of the FlexSight experiment include: enabling a robot to perceive a large and widespread class of rigid and deformable objects in an accurate and reliable way, with a particular emphasis on the computational speed of the whole system; implementing a prototype of a compact industrial sensor (the FlexSight Sensor, FSS), that integrates all the required sensing and processing needed to run the detection and localization algorithms inside a robust and small chassis; integrating the FSS within a working system that will be tested in several industrial and logistic use cases. Further information can be found at http://www.flexsight.eu/.
Flourish

The goal of the Flourish project is to bridge the gap between the current and desired capabilities of agricultural robots by developing an adaptable robotic solution for precision farming. By combining the aerial survey capabilities of a small autonomous multi-copter Unmanned Aerial Vehicle (UAV) with a multi-purpose agricultural Unmanned Ground Vehicle (UGV), the system will be able to survey a field from the air, perform targeted intervention on the ground, and provide detailed information for decision support, all with minimal user intervention. The system can be adapted to a wide range of farm management activities and different crops by choosing different sensors, status indicators and ground treatment packages. The gathered information can be used alongside existing precision agriculture machinery, for example, by providing position maps for fertiliser application. Further information can be found at http://flourish.informatik.uni-freiburg.de/.
RoboCup@Work

The goal is to use RoboCup as a vehicle to promote robotics and AI research, by offering a publicly appealing, but formidable challenge. One of the effective ways to promote science and engineering research is to set a challenging long term goal. When the accomplishment of such a goal has significant social impact, it is called a grand challenge project. Our team, the SPQR@Work, partecipated in the RoboCup@Work competition. Further information can be found at http://www.robocup.org/.
RoCKIn
RoCKIn is an EU-funded project aiming to foster scientific progress and innovation in cognitive systems and robotics through the design and implementation of competitions. Additionally, we want to increase public awareness of the current state of the art in European robotics and demonstrate the innovation potential of robotics applications for solving societal challenges and securing the competitiveness of European industry in global markets. Further information can be found at http://rockinrobotchallenge.eu/.